Calibration anémomètre assistée GPS

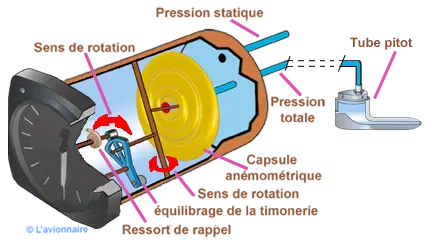
La période initiale d’essais en vol d’un nouvel aéronef construit par un amateur est une période passionnante, avec de nombreux éléments à vérifier et à étalonner. L’un des étalonnages les plus importants est certainement celui de la vitesse. Bien qu’un essai du système de Pitot et statique puisse vous indiquer que les systèmes Pitot et statique ne fuient pas et que l’indicateur de vitesse est correctement étalonné, la conception et l’emplacement du tube de Pitot et des prises statiques peuvent tous deux introduire une erreur supplémentaire, appelée erreur d’installation, dans l’indication de vitesse, et cette erreur dépend également de la vitesse. Par conséquent, le seul moyen de déterminer que l’indication de vitesse en vol est correcte est d’effectuer un essai en vol.
Les pilotes ont mis au point un certain nombre de techniques pour effectuer l’étalonnage en vol des indicateurs de vitesse. Ces méthodes comprennent le vol sur un parcours mesuré, l’utilisation d’équipements étalonnés en vol, tels que des perches Pitot-statiques d’essai en vol, des capteurs remorqués, des avions d’accompagnement, ainsi que l’utilisation de techniques basées sur le GPS.
La méthode basée sur le GPS la plus répandue consiste peut-être à voler face au vent et dos au vent, à la même altitude et à la même vitesse. La vitesse vraie est la moyenne des vitesses sol lors des passages face au vent et dos au vent, en supposant que la trajectoire de vol soit parfaitement alignée avec le vent. À l’aide d’un calculateur, on peut ensuite convertir la vitesse vraie en vitesse calibrée.


Une extension de cette idée consiste à effectuer trois branches à la même altitude et à la même vitesse. La méthode à trois branches élimine la nécessité d’aligner précisément la trajectoire de vol avec le vent. Une procédure de calcul simple (voir, par exemple, la circulaire consultative 23-8B, FAA, 2003) permet de calculer la vitesse vraie, la vitesse du vent et la direction du vent.
Lorsque j’ai élaboré le programme d’essais pour mon Pulsar, j’ai effectué quelques essais préliminaires dans un Cessna 150 et j’ai constaté deux problèmes avec cette méthode :
- Après un virage, il faut un certain temps pour que la vitesse se stabilise.
- La méthode ne fournit aucune information sur la qualité du résultat obtenu. Il est donc nécessaire d’effectuer plusieurs étalonnages et d’en faire la moyenne des résultats.
Mon aéronef est équipé d’un EFIS Advanced Flight Systems AFS-4500, qui a la capacité d’enregistrer les paramètres de vol à des intervalles d’une seconde. J’ai développé une procédure de calcul simple pour étalonner la vitesse en effectuant une trajectoire circulaire au sol, sans avoir besoin d’un contrôle précis de la vitesse, de l’altitude et du cap, en utilisant les données du journal de vol de l’EFIS. Par conséquent, il a été possible d’étalonner l’indicateur de vitesse dès le premier vol sans effort important en vol, j’avais déjà prévu d’effectuer une orbite au-dessus de l’aérodrome.
De plus, cette technique peut être utilisée avec un enregistrement manuel des données, là encore sans avoir besoin d’un contrôle précis de la vitesse, de l’altitude et du cap. En outre, cette technique fournit une indication de la qualité de l’étalonnage.
COLLECTE DES DONNÉES DE VOL
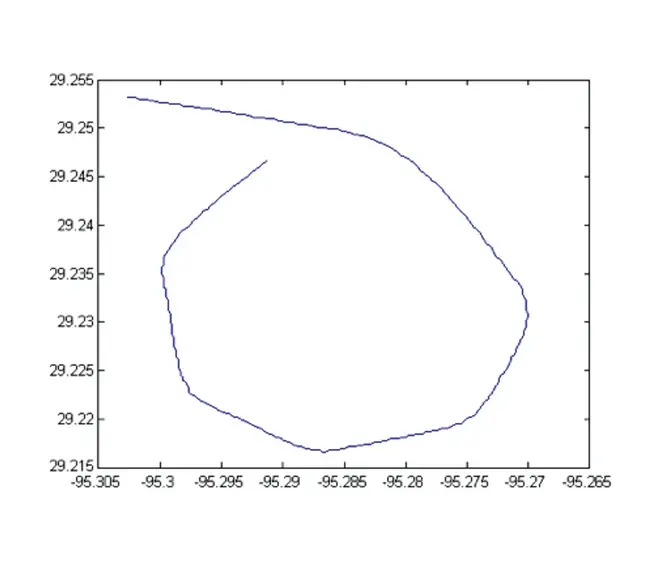
La technique de collecte des données consiste à effectuer quatre branches ou plus à une altitude approximativement constante et à une vitesse approximativement constante. Chaque branche doit être d’une durée suffisante pour permettre de recueillir plusieurs points de données si l’on utilise des données EFIS enregistrées. Un exemple de trajectoire de vol est présenté à la Figure 1. Notez que dans cet exemple, six branches d’une longueur approximativement égale sont effectuées. Vous devez noter l’heure de début et l’heure de fin afin de faciliter la localisation du passage dans le journal de données de l’EFIS. L’algorithme nécessite au moins quatre points de données, mais un nombre plus important améliorera l’étalonnage. Si vous enregistrez les points manuellement, après stabilisation sur chaque branche, notez le cap, la vitesse, l’altitude, la trajectoire GPS et la vitesse sol GPS (un enregistreur audio est pratique, mais la charge de travail liée à l’enregistrement est assez faible).
Vous devrez également enregistrer la température extérieure (OAT), le point de rosée et le calage altimétrique. Si vous ne disposez pas de l’OAT dans les journaux, vous pouvez l’estimer en utilisant le gradient thermique standard de trois degrés Fahrenheit par mille pieds, soustrait de la température au sol. Utilisez le point de rosée et le calage altimétrique de l’aérodrome le plus proche.
PRÉSENTATION DE LA PROCÉDURE DE CALCUL
Toutes les méthodes d’étalonnage de la vitesse précédemment décrites fournissent une solution algébrique directe, ce qui signifie qu’elles aboutissent exactement au même nombre d’équations que d’inconnues. L’approche multipoint aboutit à un nombre d’équations supérieur au nombre d’inconnues, beaucoup plus important. Par conséquent, plutôt que de calculer directement les valeurs des inconnues qui résolvent les équations, nous calculons les valeurs des inconnues qui minimisent l’erreur moyenne. Cette approche est appelée un problème de minimisation par la méthode des moindres carrés.
La deuxième différence majeure de la technique multipoint est que nous ne calculons pas la vitesse vraie. À la place, nous calculons l’erreur moyenne de vitesse indiquée. Il n’est donc pas nécessaire que chaque mesure soit effectuée à la même vitesse indiquée et à la même altitude, tant que l’écart par rapport à la vitesse et à l’altitude nominales est faible, cet écart n’aura pas d’incidence significative sur les résultats.
Les mathématiques ne sont pas particulièrement complexes, mais elles nécessitent une quantité importante de programmation. J’utilise une technique appelée quasi-linéarisation modifiée, mais il existe de nombreux algorithmes de minimisation numérique qui pourraient être utilisés à la place.

UTILISATION DE LA FEUILLE DE CALCUL
Afin de rendre la méthode accessible, j’ai développé une feuille de calcul Excel qui intègre les algorithmes mathématiques à l’aide de macros Excel. Voici comment l’utiliser :
- Pour commencer, téléchargez le modèle de feuille de calcul et enregistrez-le dans un répertoire de travail sur votre PC. Je l’ai développé pour Microsoft Excel à partir d’Office 2010, mais il devrait fonctionner avec toute version récente d’Excel. Il est important que les macros soient activées, car la feuille de calcul utilise largement les macros. Une feuille de travail au format PDF est également disponible sur la page web, que vous pouvez utiliser pour enregistrer les points de données et autres informations pertinentes en vol, ou pour extraire manuellement les points de données d’un journal EFIS.
- Dans l’onglet des données de vol de la feuille de calcul, saisissez les points de données. Si vous utilisez des données EFIS enregistrées, vous pouvez copier et coller depuis les journaux EFIS pour l’ensemble du segment de vol. S’il n’est pas pratique de copier et coller, saisissez manuellement un ou deux points de données pour chaque branche. La feuille de calcul peut gérer jusqu’à 1100 points de données, mais plus de 100 points entraîneront des temps de calcul extrêmement longs, plusieurs minutes. Saisissez également la température extérieure (OAT, Fahrenheit), le point de rosée (Fahrenheit) et le calage altimétrique (Baro, pouces de mercure, par exemple 29.92).
- À l’aide du menu Fichier, Enregistrer sous, enregistrez vos données dans une nouvelle feuille de calcul. Appuyez sur le bouton intitulé « Appuyer pour calculer l’étalonnage ». La feuille de calcul effectuera alors les calculs. Le temps nécessaire pour terminer les calculs variera de quelques secondes seulement sur un ordinateur relativement rapide avec un petit nombre de points de données, à quelques minutes sur un ordinateur plus lent et avec de nombreux points de données. L’algorithme est itératif, donc les valeurs d’étalonnage sont mises à jour à chaque itération, ce qui vous permet de suivre la progression.
LES RÉSULTATS
Lorsque les calculs sont terminés, la section de la feuille de calcul intitulée « Calibration Results » cesse de changer et affiche les résultats finaux :
- IAS Corr [knots] : Correction de la vitesse indiquée en nœuds. Si elle est positive, la vitesse calibrée est égale à la vitesse indiquée plus la correction. Si elle est négative, soustrayez la correction.
- Hdg Corr [deg] : Il s’agit de la correction moyenne entre le cap indiqué et le cap magnétique. Si la déviation du compas de l’aéronef est constamment nulle et que le vent est constant, cette valeur devrait également être nulle. Si le vent est constant, la valeur de la correction de cap est approximativement la déviation moyenne, ce qui n’est pas particulièrement utile. Lorsque le vent n’est pas constant pendant un passage d’étalonnage, les variations du vent auront tendance à augmenter l’amplitude de la correction moyenne de cap. Ainsi, en pratique, la correction moyenne de cap n’est pas très utile.
- Wind Dir [deg] : Direction moyenne du vent pendant le passage d’étalonnage. Si l’EFIS enregistre le vent, cette valeur devrait être proche du vent calculé par l’EFIS. Vous pouvez également utiliser les vents estimés en altitude pour valider le calcul.
- Wind Spd [knots] : Vitesse moyenne du vent pendant le passage d’étalonnage.
- Mean Cal Error : Il s’agit d’une mesure de la qualité de l’étalonnage, dérivée de la différence entre la vitesse sol GPS et la vitesse sol calculée en utilisant le vent estimé et la vitesse indiquée corrigée à chaque point de données. Si la déviation du compas et le vent sont constants, et que l’enregistrement des données est parfait, l’erreur moyenne d’étalonnage sera nulle. En pratique, une erreur moyenne d’étalonnage de deux ou trois nœuds est normale, et l’on observe souvent plus de cinq nœuds si le vent est en rafales. Dans des conditions extrêmement turbulentes, l’erreur moyenne d’étalonnage peut être très importante, ce qui indique que la qualité de l’étalonnage est faible. Si l’erreur moyenne d’étalonnage est supérieure à dix nœuds, l’étalonnage ne doit pas être considéré comme fiable.
Il est courant que l’erreur moyenne d’étalonnage soit supérieure à la correction de vitesse, car l’algorithme d’étalonnage suppose un vent constant et une déviation de compas constante. La correction de vitesse est la valeur qui minimise l’erreur moyenne d’étalonnage. Même si la correction de vitesse est nulle, l’erreur moyenne d’étalonnage sera assez importante si la déviation du compas est élevée ou si le vent est en rafales.
EXEMPLE D’ÉTALONNAGE
Les données de l’exemple ont été recueillies à une altitude d’environ 3900′ msl et à une vitesse indiquée d’environ 73 KIAS dans un aéronef Pulsar équipé d’un EFIS Advanced Flight System AFS 4500. Les vents indiqués par l’EFIS ont varié pendant le passage entre 267° (magnétique) à 30 Kt et 280° à 25 Kt. La trajectoire au sol est présentée à la Figure 1. Le pilote automatique a été utilisé pour maintenir l’altitude et les virages étaient à taux standard (3/sec).
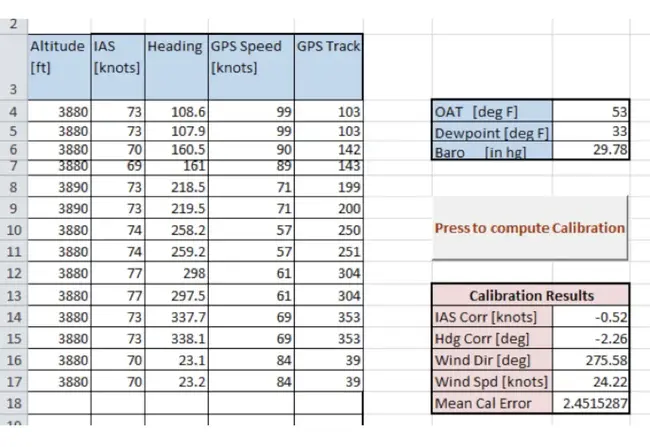
Le passage d’étalonnage a duré 288 secondes. La Figure 2 montre un exemple de feuille de calcul utilisant deux points de données pour chacune des sept branches du passage d’étalonnage. L’EFIS indiquait environ 5 kt de variation du vent, et l’erreur moyenne d’étalonnage est d’environ 2,5 kt. Par conséquent, nous pouvons avoir une bonne confiance dans les résultats.
UTILISATION DES ÉTALONNAGES
La procédure multipoint d’étalonnage de la vitesse réduit la charge de travail du pilote et assouplit l’exigence d’un contrôle extrêmement précis de la vitesse pendant les passages d’étalonnage de vitesse assistés par GPS. Elle ne remplace pas l’étalonnage au sol de l’indicateur de vitesse, qui est requis pour la certification IFR et qui est également une très bonne idée pour les aéronefs utilisés uniquement en VFR.